Welcome to the Third Edition of the aQua-Letter!
We’re back with another exciting round of updates from aQuatonomous! Our team has made significant progress across multiple sub-teams, and we’re excited to share some key milestones from this past week. Let’s dive into the updates!
Business Team Update
The Business Team has been busy with sponsorship outreach, and we’re thrilled to announce two new official sponsors: Honeywell and Seaspan ULC! These partnerships are a huge boost to our efforts, and we’re incredibly grateful for their support.
In addition to these successes, many sponsorship discussions are currently in progress, with promising opportunities on the horizon. We’re looking forward to securing even more support in the coming weeks to help power aQuatonomous forward!
Autonomy Team Update
The Autonomy Team has officially entered the development phase of several exciting projects. Here’s a quick rundown of what’s in the works:
- Task Selector: We are creating a ROS2 node to map controller inputs to autonomous tasks. Using MAVROS, we’re interfacing with the controller to streamline task execution, which will be key for smooth autonomous operations.
- Path Executor: After a task is selected, the Path Executor will generate and execute the next move, diving deep into task execution logic using MAVROS.
- Gazebo Simulation Setup: We’re building a detailed simulation environment in Gazebo, complete with fluid dynamics, to test our vessel’s performance. This setup is critical for validating our systems before deploying them on the water.
- Shortest Distance Planner: Focused on navigation, we’re implementing algorithms like A* to plot paths in a 3D buoy-obstacle map, optimizing how our vessel navigates challenges.
The team is energized by these developments, and the Jetson platform will soon be integrated to bring these systems to life. We are also laying the groundwork for Autonomous Docking and Return Home features, which will be essential for competition success. Stay tuned for more autonomy-focused updates in the next edition!
Mechanical Team Update
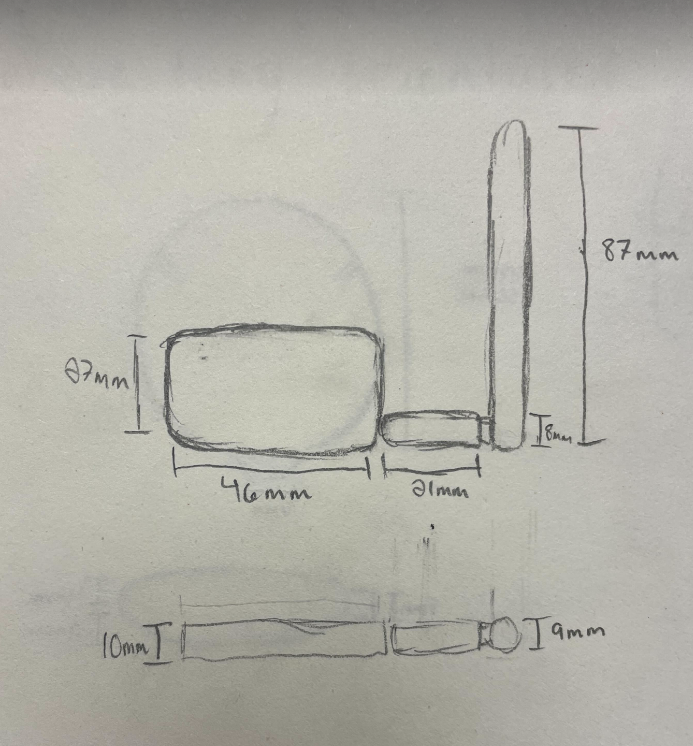
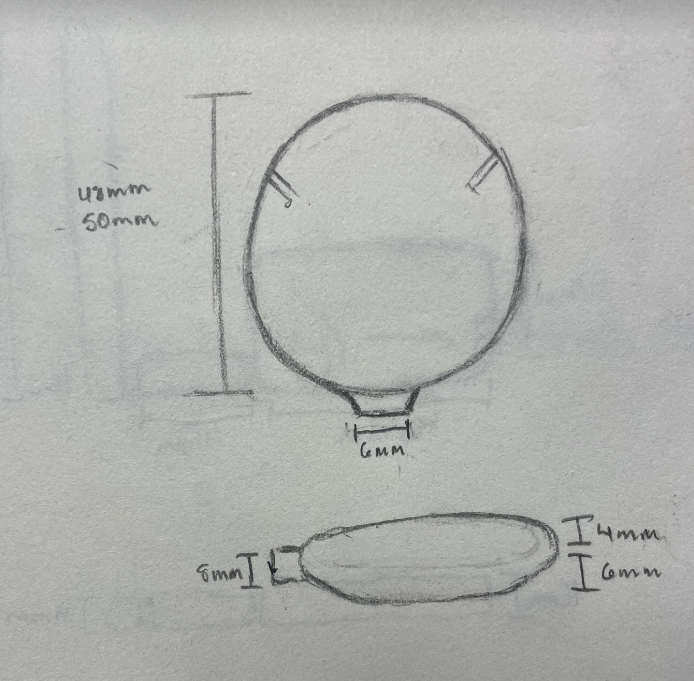
The Mechanical Team has been making steady progress as well. They’re currently working on the telemetry radio mounting system, and their efforts have produced the latest design sketches. These advancements are critical for ensuring reliable data communication during testing and competition.
Ecological Science & Research Update
The Ecological Science and Research Team has divided into two groups, one studying the effects of motor fuel and the other researching algae. Both groups are drafting their proposals and fine-tuning the specifics of their studies.
Looking Ahead
As always, we are proud of the progress made by every member of aQuatonomous. Stay tuned for the next edition of the aQua-Letter, where we’ll bring you more exciting updates and showcase the latest from our thriving sub-teams!